总结
机器人三定律
【2019-05-15】机器人的发展也引发了人类的担忧。1940年年底,著名科幻作家艾萨克·阿西莫夫和科幻编辑约翰·坎贝尔,共同为机器人制定出一套行为规范和道德准则‘,这就是著名的“机器人学三定律”:
- 一、机器人不得伤害人,或任人受伤害而袖手旁观;
- 二、除非违背第一定律,机器人必须服从人的命令;
- 三、除非违背第一及第二定律,机器人必须保护自己。 作者:集智学园
《转圈圈》讲述的是一个名叫速必敌(Speedy)的机器人,它接受了人类的命令,去危险的硒溶池执行采集任务。当它越来越靠近目的地,危险的程度越来越高,第三定律让它不得不离开以保护自己;但当它开始远离目的地,第二定律又让它必须服从命令前进。因此,它被置于一个前后两难的矛盾境地,围绕着硒溶池不停地转圈圈。
机器人行业
据国际机器人联盟(IFR)划分标准,可将机器人分为工业机器人和服务机器人。
- 工业机器人指应用于生产过程与环境的机器人,如焊接、包装、搬运、涂料、切割机器人等;
- 服务机器人指除工业机器人外,用于非制造业并服务于人类的各种机器人,分为个人/家用服务机器人及专业/商用服务机器人。
十四五规划全文,其中第三篇第十一章第一节提出加快数字化发展,具体涉及物联网、人工智能,第三篇第八章第四节提到智能机器人产业,覆盖车联网、智能家居、医疗等行业
RPA
【2022-7-22】SAP 智能机器人流程自动化(iRPA)解决方案分享
智慧企业的一个特征就是具备将复杂但低附加值的重复流程通过自动化的方式完成的能力。通过自动化,从而将宝贵的人力资源投入到更高附加值的工作中去,比如提供产品和服务的品质,提升用户体验。
- ABAP:SAP脚本录屏和SAP eCATT(extended Computer Aided Test Tool) 都是进行功能自动化测试的利器,可惜其只能工作在SAP GUI环境下面
- 随着全球企业数字化转型的趋势继续加深,涌现了一大批智慧机器人流程自动化(Intelligent Robotic Process Automation,简称为
iRPA)解决方案的供应商,比如这个领域的领头羊 UIpath, Blueprism, AutomotionAnywhere,以及国内的供应商艺赛旗、UiBot、弘玑Cyclone 、云扩科技等。 - 2021年,SAP也发布了自己的iRPA解决方案,基于SAP云平台CloudFoundry环境,支持云端部署,通过编写,调度,管理和监控机器人工作流,来完成原本需要通过人工进行的重复性操作。SAP iRPA的智能化,体现在其与SAP Leonardo Conversation AI服务的无缝集成。除了iRPA解决方案本身之外,SAP也发布了预定义好的基于SAP多款产品,比如S/4HANA的智能机器人流程脚本,帮助客户加速实现企业流程自动化。
- SAP iRPA基于API和元数据实现机器人自动操作,从根源上避免了产品界面更改之后造成原有流程脚本不工作的可能性
机器狗
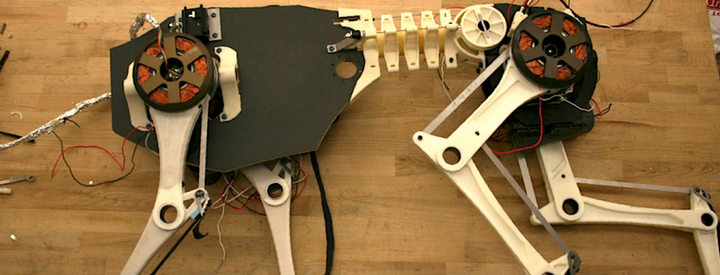
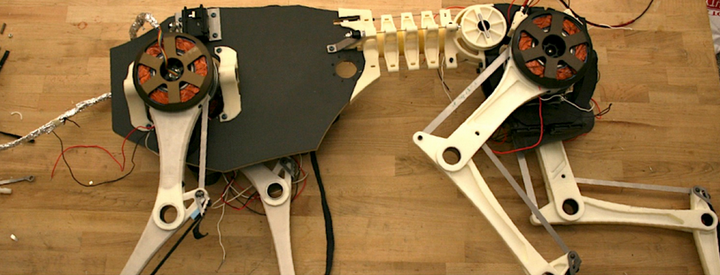
【2022-9-21】ETH:如何设计一个机器狗
无人机
无人机排名
2025年,无人机前十名:参考
- 大疆/DJI、亿航/Ehang、昊翔/yuneec、SenseFly(瑞士)、英特尔/Intel(美国)、道通智能/Autel Robotics、华科尔/walkera、TENGDEN、极飞/XAIRCRAFT、FreeFly (美国)
- 道通科技(AUTEL)国际排名第6,国内第4
另一个榜单:
2025 年全球无人机十强榜单,中国七席:
- 大疆、亿航、极飞、道通
详情
- 一、
大疆DJI:消费级与行业级双轮驱动的全球霸主- 大疆以 70% 全球消费级市场份额稳居榜首
- 2025 年推出的 “御 Mavic 5” 搭载仿生视觉避障系统,可在复杂城市环境中实现厘米级导航。
- 农业无人机 T60 系列通过 AI 病虫害识别技术,将农药喷洒效率提升 30%,累计服务农田超 8 亿亩。
- 从航拍爱好者到农业巨头,大疆用全产业链布局巩固领导地位。
- 二、
亿航eHANG:载人无人机商业化破局者- 全球首个实现城市空中交通(UAM)商业化的品牌,亿航的 “EH216-S” 载人无人机已在迪拜、深圳开通 “空中出租车” 试点,并通过欧盟适航认证。
- 其物流网络覆盖东南亚 80% 岛屿,单日配送量突破 10 万单,重新定义偏远地区物资运输模式。
- 三、
极飞XAG:农业无人化的生态构建者- 极飞科技聚焦智慧农业,“P150 农业无人机” 通过多光谱传感器与 AI 算法,精准生成施肥方案,减少农药使用量达 12 万吨。
- 2025 年联合 50 家机构推出 “无人农场” 计划,实现耕种管收全流程自动化,成为可持续农业标杆。
- 四、
道通智能AUTEL:AI 赋能的行业解决方案专家- 道通智能的 “EVO III” 支持 100 架无人机协同作业,可应用于森林火灾监测与应急指挥。
- 其全球首款氢燃料电池无人机续航提升至传统机型 3 倍,被《麻省理工科技评论》评为 “年度十大低碳技术”。
- 五、
纵横股份JOUAV:工业无人机中国标杆- 纵横股份的 “CW-100Max” 油电混合动力无人机续航达 16 小时,搭载高精度激光雷达,在地质灾害区域实现实时三维建模。
- 作为国内首家上市工业无人机企业,其年营收增长率连续三年超 40%。
- 六、
傲势AOSSCI:军工与民用的跨界先锋- 吉利旗下的傲势科技,X8H 机型采用模块化设计,可快速切换侦查、通信中继等任务载荷,在台风救援中实现 72 小时不间断巡航。其与北约合作开发的军用无人机已进入量产阶段,成为少数打入国际军工市场的中国品牌。
- 七、
普宙GDU:重载无人机的技术革新者- 普宙 “S400” 机型载重达 300 公斤,与顺丰合作开通 “跨海无人机货运专线”,单次飞行距离突破 500 公里。
- 自研的 “宙斯” 飞控系统支持北斗三代导航,定位精度达毫米级,被民航局列为适航认证参考方案。
- 八、
联合飞机:全产业链自主化的国产典范- 联合飞机实现从飞控系统到发动机的全自主化生产,TD 系列共轴双旋翼无人机在海拔 6000 米以上稳定作业。
- 2025 年推出的 “光能 + 氢能” 混合动力无人机续航突破 48 小时,为南极科考提供关键技术支持。
- 九、
拓攻TopGun:农业植保的隐形冠军- 拓攻的 “TG-30” 机型支持夜间红外作业与变量播撒技术,被联合国粮农组织列为 “粮食安全推荐设备”。其 “无人机 + 卫星遥感” 平台帮助农户精准监测土壤墒情,累计销量超 5 万台,占据国内植保市场 25% 份额。
- 十、
中无人机:军工技术的民用转化标杆- 中航集团旗下的中无人机,将 “翼龙” 系列军用技术转化为民用,“翼龙 - 2M” 配备合成孔径雷达与光电吊舱,参与 “一带一路” 智慧城市项目,提升公共安全响应效率。
中美竞争
美国禁令
- 2016年起,美国以“数据安全隐患”为由,禁止军队使用
大疆无人机。 - 2020年,美国将
大疆纳入出口管制的“实体清单”,使其无法获取美国的核心技术支持。- 2020年12月18日,美国商务部以“保护美国国家安全”为由,将包括中国最大的芯片制造商
中芯国际和中国无人机制造商大疆在内的59家中企列入所谓“实体清单”,进行对美出口“管制”。
- 2020年12月18日,美国商务部以“保护美国国家安全”为由,将包括中国最大的芯片制造商
- 2024年,美国再次计划对中国无人机实施高额关税
- 2025年,美国希望彻底打击
大疆和道通。
任何一届政府上任,无论是拜登还是特朗普,对中国无人机的“打压政策”始终没有间断。
这种“围追堵截”的根本原因
- 中国无人机技术过于先进,美国无人机制造商无法与之竞争,担心面子丢失以及市场流失。
统计数据显示
- 大疆在美国安防市场的份额达90%,紧急救援领域则为92%,而商用市场占有率为58%。
- 美国本土无人机价格是中国无人机的3-4倍,但其技术水平却远不及后者。
2025年1月5日,中国商务部发布两份文件,将28家美国企业纳入出口管制名单,并将10家美国公司一起列入了“不可靠实体清单”。
大疆
大象放映室:“嫌世界太蠢”的技术狂人,让中国无人机碾压全球
- 汪韬:这个世界太笨了,聪明人只有任正非
机器人公司
十大机器人公司
全球十大机器人公司
- 1、 发那科(FANUC):日本
- 2、 库卡(KUKA)
- 3、 那智不二越
- 4、 川崎机器人
- 5、 ABB机器人
- 6、 史陶比尔
- 7、 柯马
- 8、 爱普生机器人(机械手)
- 9、 安川(Yaskawa)
- 10、 新松机器人
| 序号 | 公司名 | 国家 | 机器人 | 介绍 |
|---|---|---|---|---|
| 1 | 发那科(FANUC) | 日本 |  |
这家公司在科研、制造、设计、销售实力等方面是目前全球最强大的给公司。发那科公司掌控了数控机床的核心技术,极大的促进了日本国内数控机床的发展。 |
| 2 | 库卡(KUKA) | 得多 |  |
成立于1995年,在全球多个国家拥有超过20个分公司。该公司的产品最初专注于城市和室内照明。如今,该公司在全球拥有3000多名员工,涉及的范围也越来越广泛。 |
| 3 | 那智不二越 | 日本 |  |
创立于1928年,总部位于东京。在日本国内有23家分公司,在全球有32家子公司,公司在全球拥有7000多名员工。主要涉及的领域有将机械加工领域、工业机器人领域、功能零部件领域和材料领域。 |
| 4 | 川崎机器人 | 日本 |  |
中国多地都有分公司,在机器人制造及生产领域有着丰富的经验。该公司在全球有3万多名员工,产品涵盖海陆空等多个领域,但航空航天领域主要依赖军工订货。 |
| 5 | ABB机器人 | 瑞士 |  |
1998年由两家拥有100多年历史的跨国企业瑞典的阿西亚公司(ASEA)和瑞士的布朗勃法瑞公司(BBC Brown Boveri)合并而成。其与世界上100多个国家都有业务往来,在全球拥有15名员工。主要为工业、交通、建筑行业的客户提供生产效率和能源效率的解决方案。 |
| 6 | 史陶比尔 | 瑞士 |  |
创立于1892年,在工业机器人、工业快速接头和纺织机械领域都处于全球领先地位。 |
| 7 | 柯马 | 意大利 |  |
成立于1976年,其29个分公司分布于全球17个国家,在全球有1万多名员工,经营范围主要涵盖机器人及维修、工程设计、动力总成以及车身焊装领域。 |
| 8 | 爱普生机器人 | 日本 |  |
成立于1942年,在数码影像领域处于全球领先地位,生产和研发机构遍布全球32个国家和地区,在全世界有94家公司和7万多名员工。在2018年世界品牌500强中,该公司位列第328名。 |
| 9 | 安川(Yaskawa) | 日本 |  |
成立于1915年,在全球有1万多名员工。公司的经营理念是打造一流的技术水平,促进和提高公司的管理和经营效率,满足市场和顾客的需要 |
| 10 | 新松机器人 | 中国 |  |
总部位于沈阳,隶属于中国科学院,产品主要涵盖智能服务机器人、清洁机器人、工业机器人、特种机器人和移动机器人,是国内机器人领域的佼佼者也是我国产业转型的重要推动力量。该公司的产品出口到了世界13个国家和地区。 |
最先进的机器人
总结
【2024-11-7】国内机器人领先者
- 众擎机器人
- 宇树科技
- 星尘智能
- 星动纪元
- 智元机器人。
波士顿动力 vs 宇树
国际机器人大会上,美国波士顿动力的机器狗spot和宇树机器狗来了一场世纪对决。
- 相对于Spot不慎摔倒后,尝试了多次才终于站起来
- Unitree Go2 一个鲤鱼打挺直接惊呆观众
【2024-5-18】 ICRA2024 挑战赛 波士顿动力+宇树
- 比赛主页RobotDrive
- 2024.01.01 - 2024.04.30 日本横滨 Yokohama
- B站 视频
机器狗–团队对应关系:
- Spot–波士顿动力
- 宇树 B2–宇树
宇树
2016年,26岁的王兴兴,离开大疆,创办了宇树科技。当时,机器人行业的标杆是美国的波士顿动力,技术顶尖,但价格更顶尖,动辄几十上百万美元。王兴兴反其道而行之,走亲民路线,做普通人买得起的机器人。
2025年,宇树人形机器人出货量超过5500台,位居全球第一。营收达到17.08亿元,同比增长335.36%;扣非净利润5.91亿元,同比增长超6倍。
放到全球格局里看,中国厂商包揽了全球约90%的人形机器人出货量,宇树又是这个队列里的领头羊。
观点
【2026-6-23】宇树科技毛利率 60%,出货量全球第一。
翻到招股书背面:
- 研发费不到 8%
- 七成收入来自高校实验室
- 扣非净利已现下滑。
这到底是一家科技公司,还是一家精密制造厂?
机械臂
产品
- Z1/D1-T
- Dex 3-1

机器狗
机器狗
- 消费级: A1, Go1, Go2
- 行业级: AlienGo, B1, B2
详情
- Unitree Go2 鲤鱼打挺
- 新款机器狗 itree B2-W,能爬山涉水、做各种高难度动作等等,网友:又惊喜又害怕。
人形机器人
人形机器人产品
- H1
- G1

Actroid-F
这种实验性机器人的目标,是创造最逼真的仿人类机器人,它们可以说话、眨眼、识别面部表情,并根据判断做出反应。

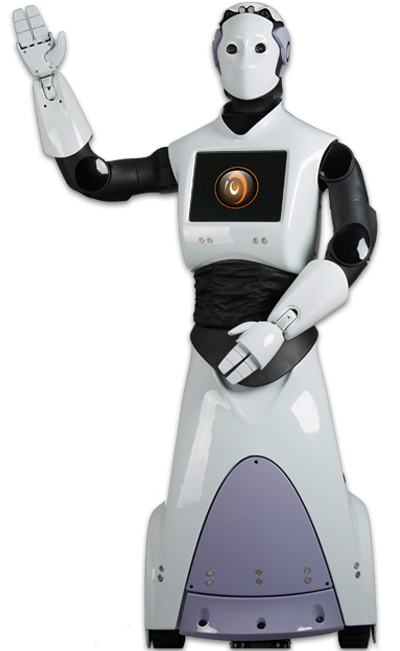
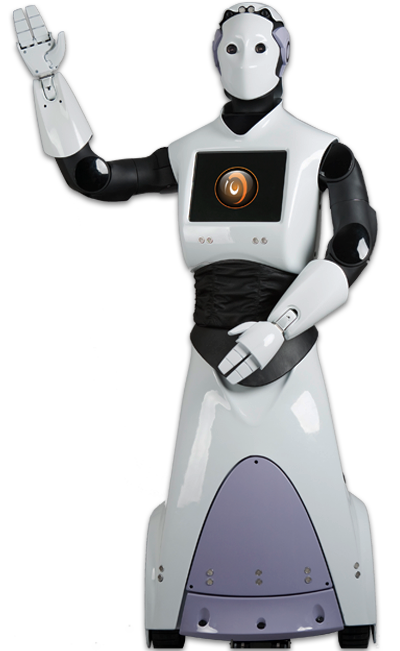
REEM
全尺寸的人形机器人,能够充当向导、接待员,用多种语言发表演讲。

幽灵泳者
一种无人驾驶水下机器人,可模仿鲨鱼或其他大型鱼类,在百米深度进行水下侦察和监视。

生化蚂蚁
这些机器人可以自己运作并对周围的刺激作出实时反应。像真正的蚂蚁一样,它会和同伴进行沟通和协调。未来你可能会看到整群的蚂蚁机器人在奔跑。
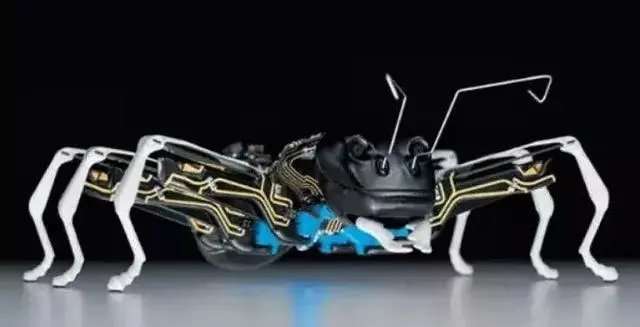
这是来自费斯托的仿生蚂蚁,他们家还有很多仿生的动物,有兴趣的可以看一下下面这张图查看:

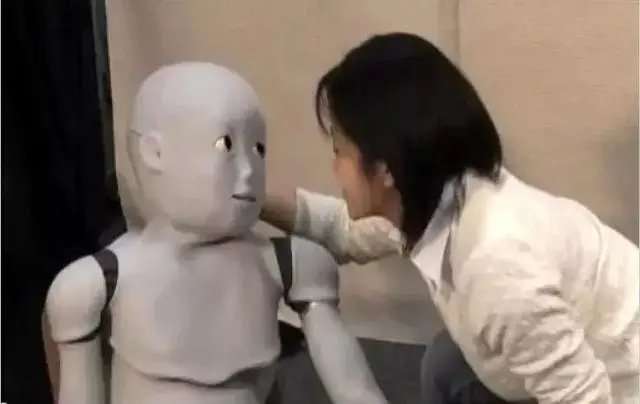
CB2
类似孩子的人形机器人,用于测试AI的学习能力。它具有识别面部表情和手势的能力,并从中获取意义(就像人类婴儿一样)。未来也许会有这样的机器人与真人同居。
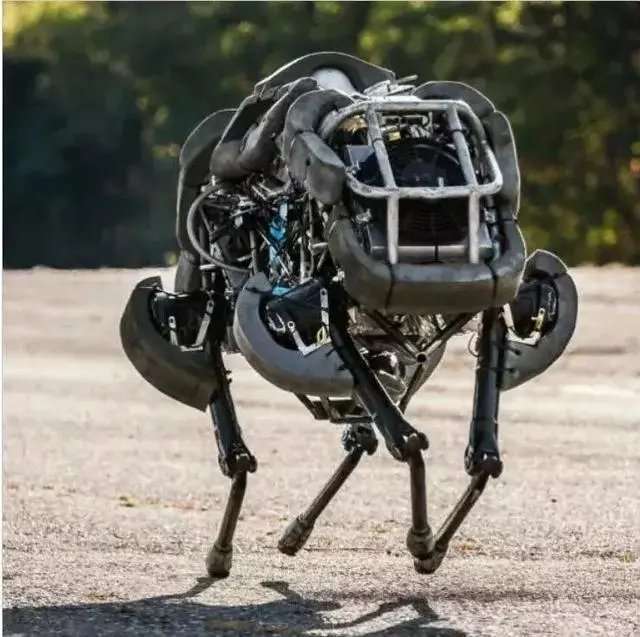
大狗
一种军事机器人,能够携带高达100斤的重量并穿过复杂的地形,这对通常的使用轮子的机器人来说是不可能的。

Robugtix T8X
外形是一个巨大的蜘蛛机器人,目前只是遥控的工具,许多正在研制的更大的、具有自主意识的蜘蛛机器人才是真正的可怕。

ASIMO
人形服务机器人,具有识别面部,声音和手势的能力,可以自主决定如何响应。可惜的是阿西莫已经停止研发了,关于它的全面报道,小伙伴们可以点击下面的动图查看:
机械飞狐
机器蝙蝠的移动和飞行都类似动物,它的翼展有两米多,重量却很轻,可以采集数据并“学习”最有效的旅行方式。这个也是费斯托的仿生动物。

猎豹3
不仅能够在崎岖的地形上奔跑,爬楼梯,在空中飞跃超过10米,而且无需使用任何相机或环境传感器即可完成这些操作

PETMAN
一种人形军事机器人,旨在模仿人类士兵的运动和行为,以测试下一代军用服装和安全设备。它可以像人一样走路、跑步、爬行。将来会部署在危险区域内的搜救行动中。它是波士顿机器人Atlas的前身。

钢管舞机器人
也许你暂时对机器人的这种表演没有兴趣,但是它们能模仿人类的较为复杂的动作(舞蹈),在机器人技术发展到更高程度时,就能派上用场。

生化轮机器人
摩洛哥沙漠中的一种蜘蛛善于适应地形(比如地形平坦时,速度会变成平时的两倍),这个机器蜘蛛就是模仿此种行为,可以快速滚过平坦的表面以及穿越更加困难的地形。

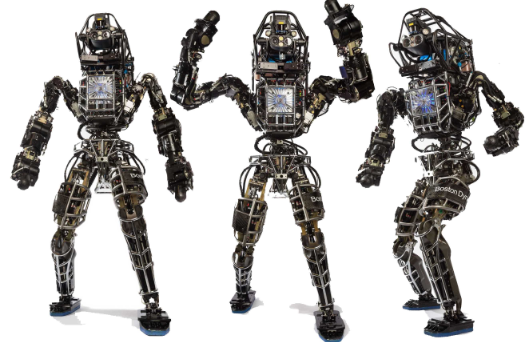
Atlas
这种先进的人形机器人已经证明了自己有能力跑步,跳跃,如果被撞倒会自己站起来,它也会穿越困难的地形,包括雪地,甚至做一个后空翻。目前它的能力还在不断开发中。

Atlas机器人就是三连跳的那个家伙
Kuratas
这个庞然大物高近4米,重约5吨,附带旋转迷你枪,一个火箭发射器和一个灵巧的人形手。

野猫
它是最快的可自由运行的四足机器人,时速达到32公里,还能在机动和转弯时保持速度和稳定性。开发者的目标是让它达到时速80公里。
SpotMini
可以在办公室或家中行动的机器人,配有可安装的手臂和抓爪,外形犹如小型恐龙。
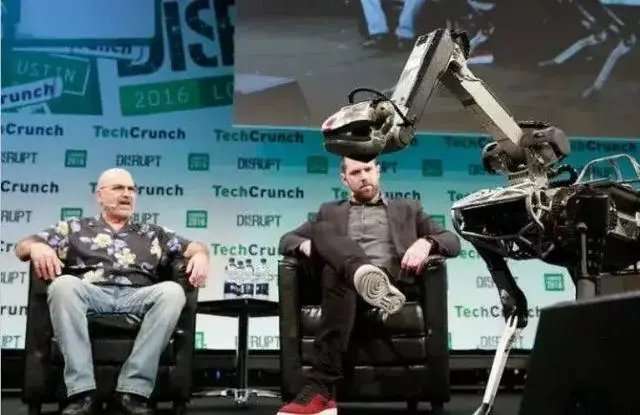
现在的SpotMini机器狗技能包已经很多了,并且已经推向市场,它真正的来到了我们身边:

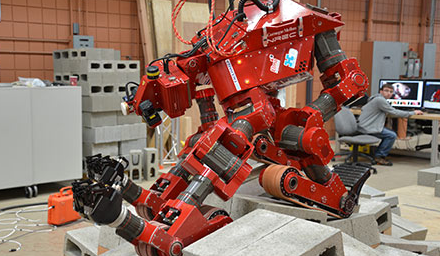
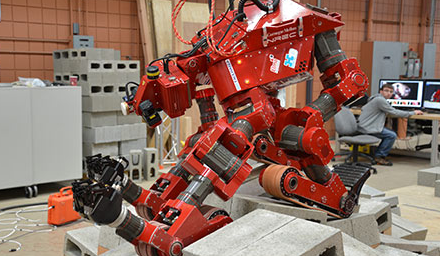
Method-2
身高4米,体重超过1.5吨,是世界上第一个载人双足机器人,该机器人的直接计划是帮助人类安全地在危险的地方工作,例如福岛核电站灾区,但长期用途可能是用于边境军事防御。
索菲亚
著名的社交人形机器人,使用人工智能与人类进行互动,可以处理自己的言语,理解和模仿人类的面部表情和行为。她的创作者相信她是创造真正有感觉的AI的第一步,她的存在已经开始模糊人与机器之间的界限。

机械海蛇
类似蛇的机器人,设计用于深水下监测和修复潜水员或潜水艇无法进入的深海电缆和灌溉管。不知为何,它被设计成可怕的黑色和红眼睛。

智元机器人
理想汽车
【2025-6-13】理想汽车内部成立两个机器人团队:空间机器人、穿戴机器人
机器人数据集
Open X-Embodiment
谷歌DeepMind曾构建过 Open X-Embodiment 数据集,数据整合自22种不同本体的机器人。
但其中大部分数据缺乏统一标准化的采集流程,且许多用于数据采集的机器人构型已经过时,数据质量格式参差不齐——这就可能在机器人策略学习过程中带来副作用。
DROID
斯坦福、UC伯克利、谷歌等构建的DROID数据集,涵盖了相对丰富的场景与技能,虽然尽可能实现规范化的数据采集流程。
但作者团队自己在后续研究中指出,DROID存在大量低质量数据,反而让机器人越学越迷茫。
AgiBot World
【2024-12-30】 稚晖君具身智能创业项目智元机器人,携手上海AI Lab、国家地方共建人形机器人创新中心以及上海库帕思联合发布。
百万真机数据集开源项目 AgiBot World,全球首个基于全域真实场景、全能硬件平台、全程质量把控的大规模机器人数据集。
- [抱抱脸链接](https://huggingface.co/agibot-world)
- 项目主页
- AgiBot World
相比于 Open X-Embodiment 数据集,此次开源的 AgiBot World 长程数据规模高出10倍,场景范围覆盖面扩大100倍,数据质量从实验室级上升到工业级标准。
AgiBot World 数据集收录了80余种日常生活中的多样化技能。
- 从抓取、放置、推、拉等基础操作,到搅拌、折叠、熨烫等精细长程、双臂协同复杂交互,几乎涵盖了日常生活所需的绝大多数动作需求。
- 按照日常生活真实需求,团队主要复刻了5个核心场景,分别是:家居(40%)、餐饮(20%)、工业(20%)、商超(10%)和办公(10%)。
- 80%的任务为长程任务,时长集中在60s-150s之间,且涵盖多个原子技能,是DROID和OpenX-Embodiment工作的5倍。
工业机器人
工业用机器人领域。
- 一线厂家包括:发那科(Fanuc 日本)、安川(Yaskawa 日本)、ABB(瑞士)、库卡(KUKA 德国)。
- 二线厂商包括Comau(意大利)、OTC(Daihen旗下 日本)、川崎(Kawasaki 日本)、那智不二越(Nachi-Fujikoshi 日本)、松下(Panasonic 日本)等等给个市场份额图,在全球市场,Fanuc和安川领先,ABB和KUKA紧随其后。
- 国际市场
- 中国市场


比较著名的机器人:按大小分
A. 小型人形机器人
Nao


Aldebaran公司出品。Nao机器人因为其优秀的能力和出众的外观设计成为这个大小的人形机器人中最出名的。现在是Robocup的最大赢家,Robocup直接为其开了标准组,统一使用Nao机器人,


单单这个比赛每年现场有上千台Nao。赚翻了。淘宝买约10万RMB,实验室买约6万。
DARwIn


Robocup比赛的成功者,Upenn和韩国电机公司Robotis合作开发的平台,拿过许多次冠军(此处感谢@李深的回答)。现在的Robocup比赛这个组别有将近一半的队伍购买Darwin,赚的很爽。基本款卖一万多美金。
iCub
iCub.org - an open source cognitive humanoid robotic platform 由IIT最初开发的仿人机器人。用它进行了很多人工智能方面的研究,现在同时进行十几项研究项目。外形非常可爱
https://www.youtube.com/watch?v=ZcTwO2dpX8A
Romeo
Aldebaran的最新作品。这个和上面的iCub其实该算中型大小

KHR-3HV
此机器人出名完全是因为下面这个人做的大量逆天作品
Dr.Guero http://ai2001.ifdef.jp/
跳舞https://www.youtube.com/watch?v=FxM40qBK02U&feature=youtu.be






售价$1800
B. 大型人形机器人
本田公司(感谢@Sum Yuan指正)的Asimo。论名声它应该是最响的。
美观的外表,极其出色的运动能力Honda Worldwide
单脚绕圈跳


大步跑步(这是这种大小的机器人我唯一见过能跑步的)


HRP系列。日本商业化最成功的人形机器人平台。一帮机器人大佬的成果。
Robotics - Humanoid Robot HRP-2 “Promet”


HRP3,是防水的


HRP4


HRP4C


对。这是机器人。
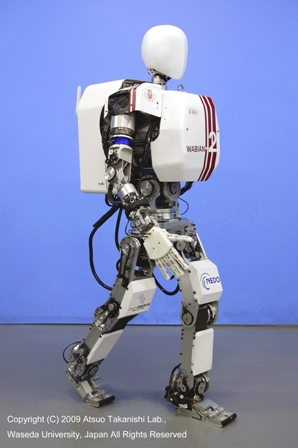
WABIAN
Biped Humanoid Robot WABIAN-2R
全称WAseda BIpedal humANoid。
人形机器人里程碑式的作品,日本的几个大佬很多重要论文都是用它做实验。

波士顿动力的Petman。波士顿动力在Humanoid运动控制上的成果主要在Petman上进行展示。
https://www.youtube.com/watch?v=5S4ZPvr6ry4
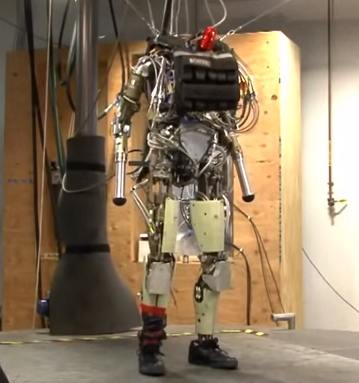
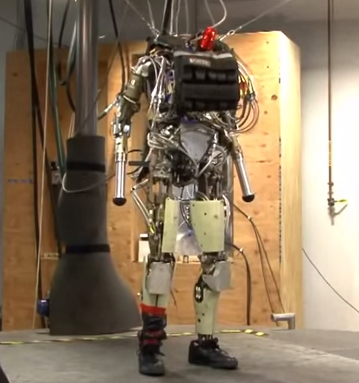
之后推出的完全版-Atlas,商业化了,到处卖,让各地买家自己研究怎么控制。不过似乎还没人能实现波士顿动力在Petman上展示的运动能力。
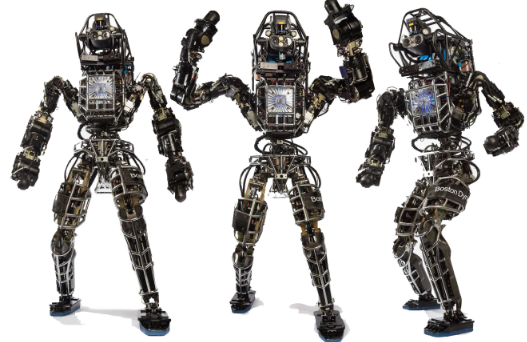
Atlas。120KG,1.9m,液压腿+电机上身,$2,000,000
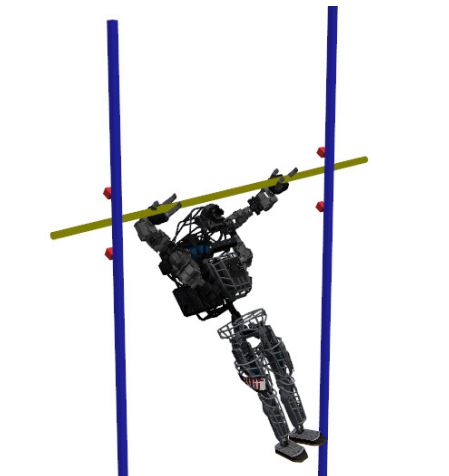
Schaft
世界最高水平机器人竞赛——DARPA Robotics Challenge去年的冠军。他们在各种任务(比如穿越废墟、爬楼梯、开车等)好像拿了16分,NASA的机器人好像只有4分。。


https://www.youtube.com/watch?v=diaZFIUBMBQ 这里是它们完成8项任务的视频。
这是他们实验室在push recovery上的水平https://www.youtube.com/watch?v=fwoFjzLZ5rQ



Valkyrie
NASA参加DRC的机器人。虽然在去年的比赛中被SCHAFT完爆,但据说是团队组织上的问题,机器人的质量还是没的说的。期待今年的表现。


值得注意的是,这是一位 女 机器人。注意胸部。。
Romela的SAFFiR

帅吧,腿部驱动器用的SEA
RoboThespian
RoboThespian
这个机器人主要用来研究人机交互。推出时的Demo是两台表演合唱。




C.巨型人形机器人
水稻桥重工的人形机器人


这货出售,100万美元,正好半个Atlas的价格。是能在路上开的。。
MegaBots
Kickstarter上众筹的一个项目,详见Kickstarter 上有哪些新奇有趣的项目? - Yifan Hou 的回答


D. 四足机器人
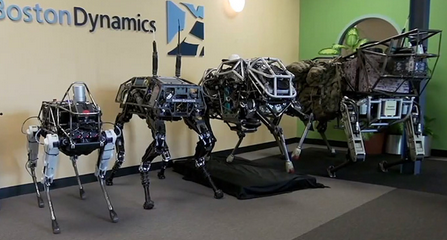
最出名的还是波士顿动力做的。
从Cheetah,Bigdog,wildcat到前不久的Spot,更轻,更稳定,更安静

UPenn,RHex等一系列小型多足机器人,以适应各种地形出名
Kod*lab : Projects




MIT cheetah
和波士顿动力的猎豹不同,MIT的猎豹从一开始就是电机驱动而非液压烧油,主打功耗低这一点。
其背后有MIT做电机的院士支持,是厉害啊


去年完成的Free版,去掉了身上保护用的架子,三十多KG的机器人仅用电机就可以跳起来,这驱动器的水平确实惊人。
E. 服务机器人
我是指拥有类人的上身和非足式的下身的机器人。
PR2
**Overview | Willow Garage
**
Willow Garage出品,非常成熟的服务机器人平台,很多研究motion planning和人智的实验室标配。$400,000


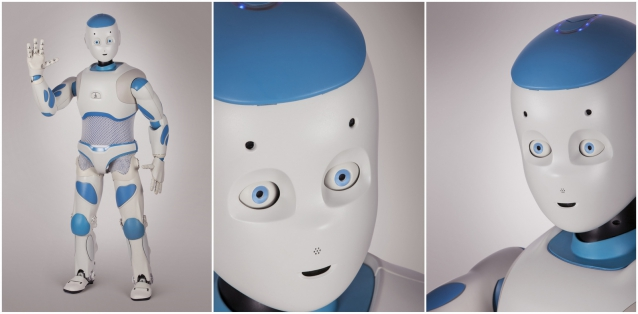
Pepper
**Pepper the robot: Intelligent robot, SoftBank
**
Aldebaran公司另一主打产品。感谢
提醒。
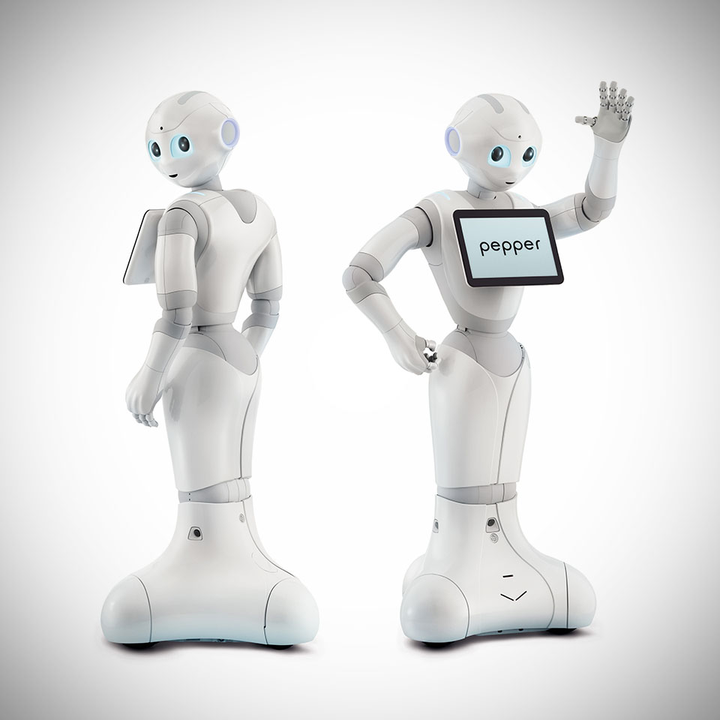

公司出品和实验室作品的直观上的最大差别就是机器人的美观程度。这个外形设计太有亲和力了。Aldebaran放出的Demo也将人机交互做到非常优秀。
Reem
PAL Robotics 出品。这是个1.7m,80kg的大家伙。我见到它时真的吓了一跳,比我粗壮多了。。
F. 奇形怪状机器人:很多不一一列举,出名的参看下面的Romela实验室
G. 外骨骼
比较成熟的是雷神的Sarcos XOS Exoskeleton


和洛克希德马丁的Fortis


穿戴运动辅助设备最近比较火,尤其是随着哈佛为代表的soft robotics材料上的发展,外骨骼正从骨架向“衣服”转变,有很多人在研究,不一一列举,可参考14年12月的RAM,是外骨骼专题
机械臂/工业机器人:
的回答已经很详细了,我就补充一个,做Baxter的Rethink Robotics上月新产品Sawyer


下面说说有哪些比较不错的机器人实验室:排名不分先后
---------------------------------------------------------------------------------
GRASP-宾夕法尼亚大学Homepage | GRASP Laboratory
Robotics at the University of Pennsylvania
非常大、优秀的机器人实验室。没法列举代表作,随便贴几个
Ted:Robots that fly
https://www.youtube.com/watch?v=4ErEBkj_3PY

四旋翼穿过扔到空中的环


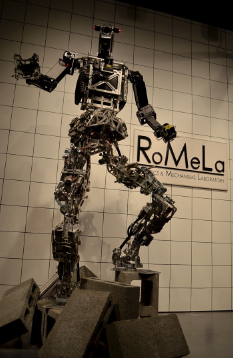
RoMeLab-UCLA和维吉尼亚大学联合
RoMeLa
Dennis Hong教授虽然引用不多,但他的创意还是非常有意思的。
ted视频:我的七种机器人
https://www.youtube.com/watch?v=cfR6tiSW-AM
The Biorobotics and Locomotion Lab - Cornell
Ruina personal home page
被动行走泰斗级人物Andy Ruina,做过一个马拉松步行机器人。。
主页上发布信息在招人,有一百万美金来做最节约能量的机器人。
Robot Locomotion Group-MIT EECS
Robot Locomotion Group
最近几年非常活跃的组,13年humanoid还拿了Best paper,组里主要研究优化方法在机器人运动控制上的应用,双足和飞行器都在做。
Russ Tedrake教授同时在开发一个物理仿真引擎Drake。

d’Arbeloff Laboratory MIT ME
Henry Asada教授,做得很多,比较出名的是生物机械增强手臂。Henry教授自己开了公司。


MIT Biomimetics Robotics Lab - MIT ME
Sambae Kim教授,做机械设计,前面提到的MIT的猎豹机器人就是他带队做的。
Alberto Rodriguez-MIT ME,刚到MIT不久的新教授,因做dynamic regrasp 出名
http://newsoffice.mit.edu/2014/professor-alberto-rodriguez-presents-work-robotic-extrinsic-dexterity

Berkeley Laboratory for Automation Science and Engineering
Prof. Ken Goldberg一半是教授一半是艺术家。
Pieter Abbeel—Associate Professor UC Berkeley—Co-Founder Gradescope—
Pieter Abbeel教授代表作品是前一段时间很火的PR2叠衣服的视频。Manipulation of deformable objects
Robotics Institute-CMU
CMU我都不打算列了,太多(RI将近70名faculty)而且官方网站整理得非常好,
Robotics Institute Research Guide : Intro
基本上机器人学的所有方面都有很多非常强的教授。。
CS四大(MIT、斯坦福、伯克利、CMU)都有很多做机器人的实验室,我这里肯定列不全,感兴趣的同学可以去按自己的方向搜一搜)
Coordinated Science Laboratory - UIUC
Seth Hutchinson教授是视觉伺服的创始人之一。其主页上讲他和好基友环游世界麦当劳的游记很有意思
Systems Laboratory-密歇根大学
由多位教授,比较有名的是做被动行走和非线性控制的Prof. Jessy Grizzle
Movement Control Lab-UW
Emo Todorov教授研究用优化方法,尤其是最优控制,解决运动控制问题。教授人非常nice,数学功底极其扎实。其代表作品可参考哪些控制类的算法惊艳了你? - Yifan Hou 的回答
GRAB Lab-Yale
The GRAB Lab at Yale University, Department of Mechanical Engineering
耶鲁不以工科著称,但这个实验室实在太厉害。副教授Aaron Dollar组里带了将近二十的博士+博士后,在机器人顶会ICRA,IROS,以及各种期刊上每年接近二十篇的发文量。主要做抓握。
我应该还漏了Georgia Tech,USC等等,有时间再补上
其他国家的话我不够了解,日本JSK实验室很强大,JSK -Home-
欧洲最出名的就是ETH Homepage - IRIS
机器人控制
VLA
ASAP
【2025-8-14】ASAP 现已完全开源
- ✅人形强化学习运动追踪和增量动作
- ✅运动重定向至任意人形生物
- ✅ ASAP 基准运动 + 预训练策略
- ✅ Sim2Sim 和 Sim2Real 已准备就绪 — 在模拟中或您的 G1 机器人上尽快运行! 🔗
行动控制
AnyCar
【2024-9-24】CMU 推出 AnyCar 是一种基于 Transformer 的通用动力学模型,专为各种轮式机器人的敏捷控制设计
- 论文 AnyCar to Anywhere: Learning Universal Dynamics Model for Agile and Adaptive Mobility
- 数据收集和模型训练代码已开源,开发者还公布了硬件配置清单
AnyCar 系统包括: 数据收集、模型训练、微调部署。
- 数据收集阶段 使用 4 个模拟器的不同物理引擎模拟各种地形,以及具有不同尺寸和物理属性的车辆
- 部署阶段再用现实世界数据微调模型,使得车辆在野外环境运行也能符合模拟预期。
实验中 AnyCar 在不同车辆和环境中展示出零样本泛化能力,最终模型与基于采样的 MPC 相结合,性能比专业模型高出 54%。
这些结果代表了构建敏捷轮式机器人控制基础模型的关键一步。
养老产业
- 十四五规划中,养老政策:如何让老年人过得舒心、暖心,是社会关注的热点以及政府、行业努力的方向。 除了养老服务,“十四五”规划和2035年远景目标纲要还制定了提高老年人社会保障等更多方面的规划目标,为亿万老年人“老有所养”绘制了新蓝图。
- “十三五”期间,中央财政支持203个城市推进居家和社区养老服务改革试点,在此基础上,“十四五”期间,政府将通过扶持互联网+养老、物业+养老、医疗健康+养老等新业态的发展,到2025年,将实现所有城区、小区养老服务设施全覆盖,形成社区“一刻钟”居家养老服务圈 。
- 而在农村,“十四五”期间,将着力补齐养老服务体系的短版,力争每个县至少建成一个县级失能半失能照护机构,两个乡镇级农村区域养老服务中心,大力发展农村互助型养老设施,为农村老人提供居家养老服务,基本构建起县、乡、村三级农村养老服务网络。
- “十四五”规划纲要提出,未来五年,还要继续加大养老机构护理型床位供给,到2025年,养老机构护理型床位占比要从“十三五”时期的48%提高到55%,稳稳托住失能老人的照护底线。
-
完善基本养老服务体系的同时,“十四五”期间,老年人的社会保障水平也将进一步提高。我国基本养老保险参保率将从“十三五”期末的超过90%提高到95%;人均预期寿命在目前77.3岁的基础上再增加一岁,亿万老年人将拥有更加可期的幸福晚年。
- 【2021-10-20】养老迈入智慧时代:智能机器人能陪老人聊天、助休闲
- 2019年末,我国60岁及以上人口为25388万人。庞大的老年群体带来的是多样的养老需求。随着时代的变化,老年人对老年生活的追求也不仅停留在“吃好,住好”,精神富足、心情愉悦、亲人陪伴同样重要。如何更好满足老人在精神、休闲和情感方面的需求?如今借助科技手段,有了“机器人”陪聊天、智能设备陪学习,养老迈入了智慧时代。
【2022-9-3】硬核晚年生活图鉴:你坐智能轮椅出门买菜,我找机器人唠唠家常
- 8 月 31 日,在优必选智慧康养全球战略发布会发布会上,这五位同学首次公开亮相。从左至右依次为:优颐达、优颐凡、优颐然、优颐乐、优颐捷。
- 养老机器人会关注每一位老人的状态,如果发现你长时间没有和人交流,或者检查到你的孤独情绪,就会主动来关怀;如果天气很好,它会主动邀请你出门晒晒太阳;到时间了,它会提醒你「记得按时吃药」。没错,它不是那种只会等待召唤的「工具人」,而是会与人类主动交互的生活伴侣。
- 这台为爱而生的陪伴机器人全名叫做「优颐然」,它的家族里还有其他四位兄弟姐妹:优颐凡、优颐达、优颐乐、优颐捷。其余四位成员的属性分别是智能代步机器人、箱式递送机器人、辅助行走机器人、开放式递送机器人,都是专门为服务老年人生活而设计的。




 支付宝打赏
支付宝打赏  微信打赏
微信打赏 
